Mecabot ’10 IUR-GN 2.0
Descripción
El proyecto realizado por los alumnos de Mecatrónica del año 2010 fue una continuación y mejora del Mecabot ’09, IUR-GN 14.
En un principio, se cambió el sistema de alimentación, desechando las pilas de Ni-Mh, e instalando baterías de Li-Po. Éstas le proporcionan al robot mayor autonomía, además de ser más livianas.
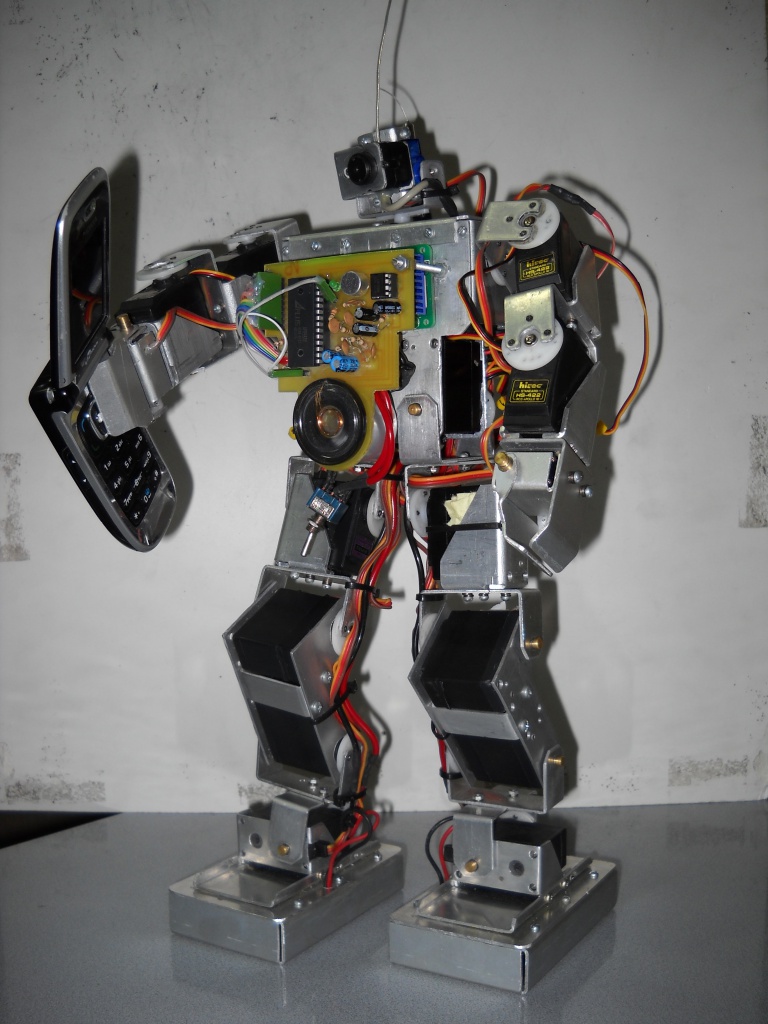
También se modificó su ubicación, colocadas en una especie de zapatos diseñados especialmente para ese fin, en vez de adheridas al pecho como las anteriores. Otra modificación realizada fue la motorización de las manos, dándole al robot la posibilidad de manipular objetos.
Además se agregó un motor para el movimiento vertical de la cámara, agregada también este año. La misma brinda al robot visión artificial, y es utilizada para el reconocimiento de rostros y colores.
Por último, se agregó el sistema de grabación/reproducción de sonidos, que funciona mediante el CI APR9600. En cuanto a software, se mejoró la interfaz con el usuario y se agregaron secuencias que incluyen los nuevos motores.
También se trabajó en temas como reconocimiento de rostros y voz, utilizando redes neuronales artificiales y aprendiendo sobre su funcionamiento.